Bahador Beigomi
PhD Robotics Engineer | Passionate about AI, Robotics, and Autonomous Systems
About Me
I am a passionate robotics engineer pursuing my PhD, specializing in autonomous systems, machine learning, and embedded systems. I have a strong background in robotics development, ranging from robot arm manipulation to reinforcement learning and computer vision. I am always eager to learn and collaborate on new projects and ideas in the field of robotics and RL.
My Robotics Projects

Towards Real-World Efficiency
Domain Randomization in Reinforcement Learning for Pre-Capture of Free-Floating Moving Targets by Autonomous Robots.
Space Debris Grasping
A fully autonomous positioning system using Curriculum Learning and Deep Reinforcement Learning to capture moving and thumbling space debris.
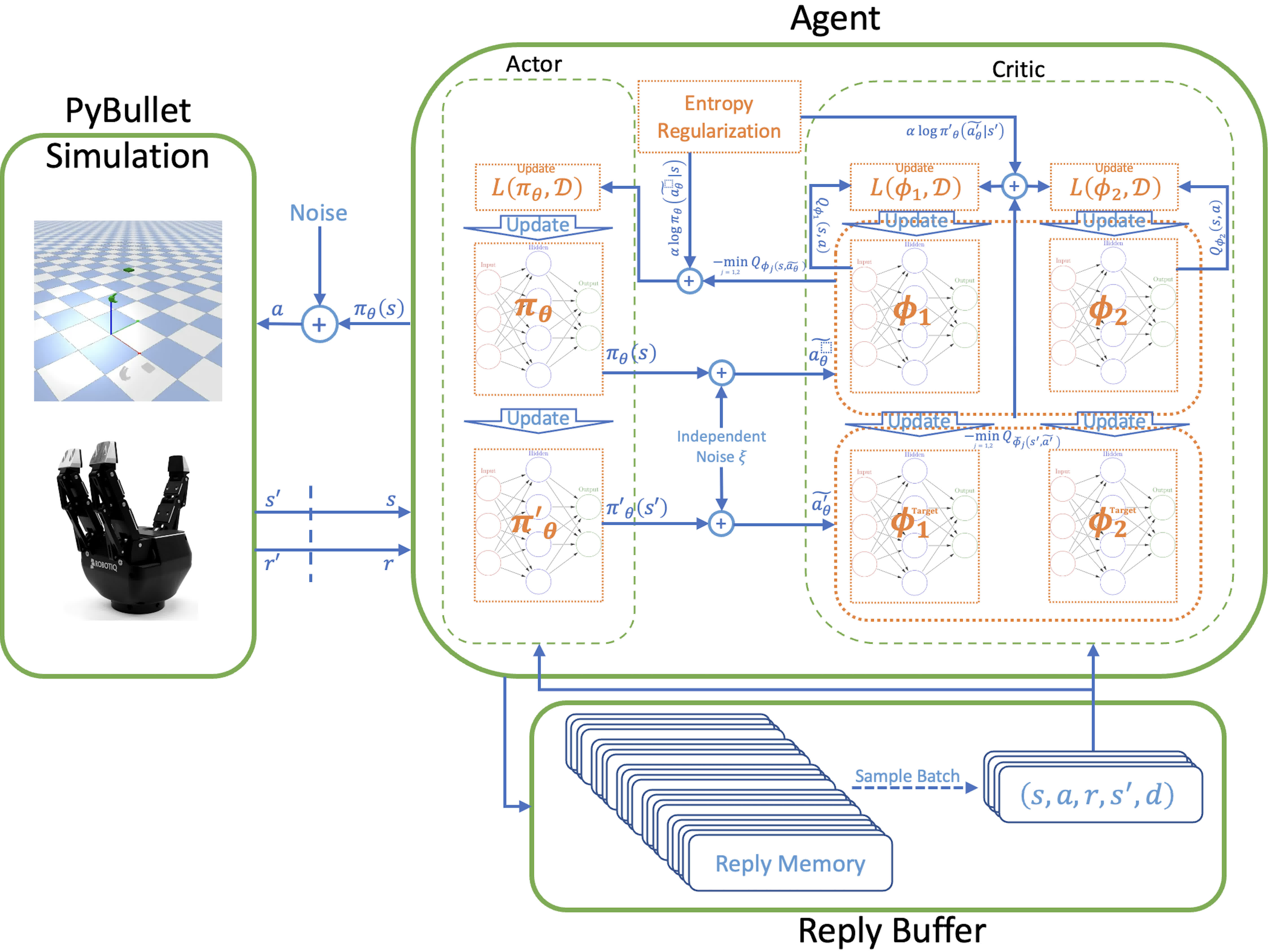
Tactile Feedback
Importance of Tactile Feedback in Soft-Capture of Space Debris is investigated using Soft Actor-Critic (SAC) algorithm.

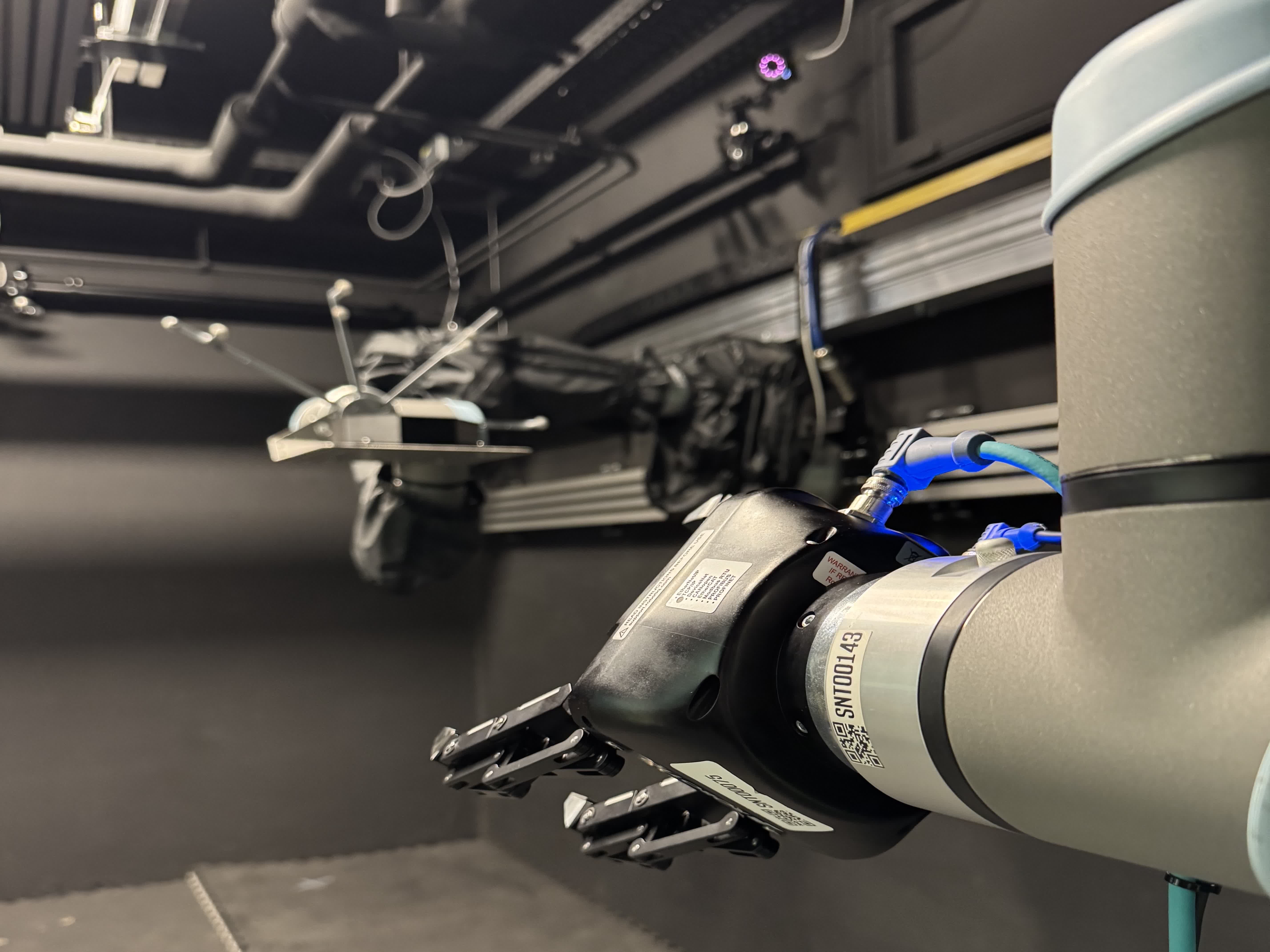
Robotiq3F_py
Control the Robotiq 3F gripper with Python via Modbus TCP, providing easy integration for various
operation modes, speed settings, and finger control.

Robot Arm Manipulation
Motion Planning and Control
Reinforcement/Imitation Learning
Simulation and Unreal Engine

Robotics Operation System (ROS)

PyTorch
OpenCV

Docker
Contact Me
Interested in collaborating or learning more about my work? Feel free to reach out.